
英国政府公認ブックメーカー”ウィリアムヒル”
英国政府公認のブックメーカー「ウィリアムヒル」
競馬、メジャーリーグ、欧州サッカー、テニス、ゴルフ、Jリーグなど様々な世界のスポーツの勝敗を予想して高額配当をゲットだぜ!
スポーツベッティングが有名ですが、カジノもバッチリやってます。
管理人が初めてルーレットを回したのが、このウィリアムヒルです(^^)



なんとかかんとか・・・形になった(^_^;) [オートログ計画]
オートログにドップリのtaroです![[わーい(嬉しい顔)]](https://blog.ss-blog.jp/_images_e/140.gif)
前回のLibreOffice版オートログの2画面化に成功して、そこを皮切りにして、Excel版もさらに改良・・・
今まで停滞していたことが、どこかの部分で突破口を見出すと、ダダダダダ・・・と次々と連鎖的に改善策が思い浮かんでくることがあります。
停滞していた時に、
あーーーーーーーーーーーでもない(-_-;)
こーーーーーーーーーーーでもない(-_-;)
と頭をこねくり回して考えていたことが、ここで生きてきているような気がします^^;
今回は、toruさん専用のMBR3D検証用オートストップ機能作成で得た知識と、LibreOffice版で考え付いた表示方法など、新しい視点と切り口(プロの方からすると大したことないんでしょうけどね^^;)で、ネックになっていた部分の解決策が見つかり、一気に前に進みました\(^o^)/
そういうわけで、SR支援用オートログの回転数無制限版については、近々Excel版とLibreOffice版を両方同時にリリース出来ることになりました\(^o^)/
また、勢いでSR倶楽部メンバー向けのover支援用オートログも2画面化出来ましたので、あとはマニュアル作成が完了次第リリースとなります。
しかし、ただ2画面化するだけ・・・というのも面白くないので・・・
簡易版のオートストップを付けることにしました。\(^o^)/
・・・というのも、複数のユーザーの方から・・・
特に先日のtoruさんのブログの記事が掲載されてから、何件かご質問、ご要望が寄せられていました。
※ルーレット兄貴の「ミ」になるオンカジDREAMER!・・・MBR3D×15カジノ最終検証~1週目結果&オートログと独自エントリーポイント [MBR3D検証プレイ](2月22日の記事)
MBR3D検証用のオートストップは、正直結構苦労しました^^;
条件付けはそれほど難しくはない・・・と思っていたのですが、いざプログラムコードにしようとすると・・・
ありゃ?
これがこーーーーなって、そんでこの変数はこのままだから・・・
これがあーーーーなったら、このフラグを出して、その時そのフラグが出ていたらこっちの処理を・・・
・・・・・・・・・
完全な文系人間のtaroからすると、途中でウッキーーーーーーーーーーーー![[むかっ(怒り)]](https://blog.ss-blog.jp/_images_e/152.gif) ってな感じでお猿さんになってしまいそうなほど難解でした(^_^;)
ってな感じでお猿さんになってしまいそうなほど難解でした(^_^;)
ただ、この苦労があったからこそ、今回のオートストップに繋がったと思います。
ちなみに、toruさんからは報酬頂いてますから(^^)
ただ働きじゃありませんよん(^^)
toruさんありがとうございますm(__)m
ただし簡易版のオートストップなので、複雑な設定は出来ません^^;
とはいえ、2種類のオートストップを実装してみました。
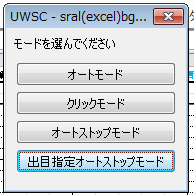
1つ目は 簡易オートストップ機能「オートストップモード」
2つ目は 出目指定でストップさせる「出目指定オートストップモード」
で・・・オートストップのやり方ですが・・・
最初のモード選択画面で・・・こんな画面ですね↓
画像がちっちゃいので、ボタンを拡大!
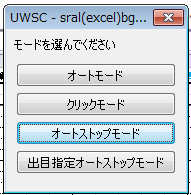
良く見ると・・・
モード選択画面の選択肢、今回のバージョンアップで変更しています(^^)
数字別間隔表を常時表示させるようにしたので、数字別間隔表へのショートカットを無くしました。
まぁこの措置は当然ですね^^;
それから、修正モードですが、オートログを作って間もない頃は、よくログミスが発生していたので付けていたのですが・・・最近はそれもないので思い切って外しました。
それに結局は数字別間隔表は修正出来ないので・・・必要ないかな・・・と^^;
そして代わりに?付けたのが、先程申し上げた「オートストップモード」と「出目指定オートストップモード」です\(^o^)/
で・・・「オートストップモード」ですが・・・
最初に書いたように簡易版オートストップなのですが・・・
クリックするとこんな画面が出ます。
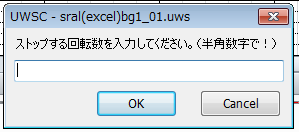
ここに回転数を入力して「OK」をクリックすると、入力した回転数以上で当たると止まります。
出目指定ではなく、最初に条件を達成した出目で止まるという仕様です。
文言については・・・さも入力した回転数で止まるように思えるので、ここの文言はリリース前に変更の予定です^^;
で・・・止まる時はこんな感じです(^^)
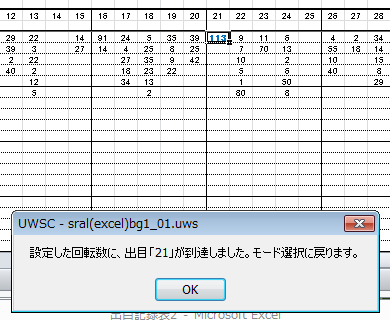
この時は100と入力して実行したのですが・・・
「21」が113回で出たので、ここでウインドウが出てオートログ止まります。
条件が100ですので「100以上の回転数」で最初に出たのが「21」だったわけです。
ちなみに止まったら、モード選択の画面に戻ります。
皆さん、それぞれ独自の手法をお持ちだと思うのですが、大抵最初はどの出目かが規定の回転数を超えてからスタートしますよね??
taroも基本はそういう手法なので、これは必須でしょう!ということで付けましたヽ(^o^)丿
スキャルピング・ルーレットがまさにこの手法ですよね。
スキャルピング・ルーレットが分からない方はtoruさんのブログや、taroを含めたオフィシャルブロガーさんのブログから無料で請求できますので、見てみてくださいませ(^^)
次に「出目指定オートストップモード」です!
一番下のやつですね(^^)
これは出目を1つだけ指定して、その出目が設定した回転数以上で当たると止まるモードです。
モード選択でこれを選ぶと・・・
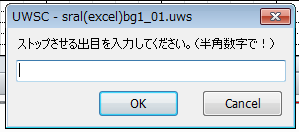
こんな感じで最初に出目を入力します。
そして、「OK」をクリックすると・・・
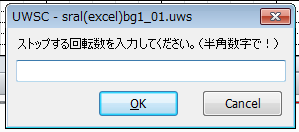
こんな感じで回転数を入力するウインドウが出ます。
これも入力した回転数以上の場合に止まるようになります。
で・・・回転数を入力して、「OK」をクリックすると・・・・
・
・
・
・
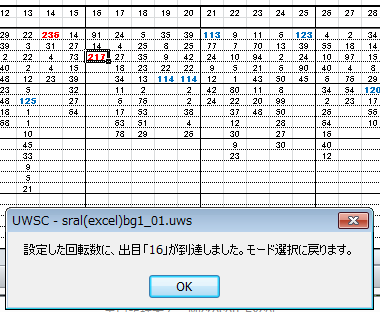
こんな感じで止まるわけです\(^o^)/
ここでは出目は「16」、回転数は「200」で設定しました。
ですので、「217」で止まってますよね(^^)
使い方としては・・・
まず最初に「オートストップモード」で、候補数字を選び出して・・・
次に「出目指定オートストップモード」で、その出目を追いかける・・・というのが基本でしょうか。
別に基本に囚われずに、ご自身の考えられた手法にうまく組み込めば、自動化できる部分も出来てくるのではないかと思います。
それに、今まではずーーーーーっと画面を見ていないといけなかったのが、回転数設定して止まるのを待つという楽ちんな使い方が出来るので、そこはグッドではないかと・・・自画自賛です^^;
そうそうオートストップが動いている間でも、オートログは続けてくれています(^^)
taroのオートログは「記録する」ことが基本ですので^^;
というわけで、最終調整とマニュアル作り頑張りますので、もうしばらくお待ちくださいませm(__)m
以上、今回はここまで![[exclamation×2]](https://blog.ss-blog.jp/_images_e/160.gif)
前回のLibreOffice版オートログの2画面化に成功して、そこを皮切りにして、Excel版もさらに改良・・・
今まで停滞していたことが、どこかの部分で突破口を見出すと、ダダダダダ・・・と次々と連鎖的に改善策が思い浮かんでくることがあります。
停滞していた時に、
あーーーーーーーーーーーでもない(-_-;)
こーーーーーーーーーーーでもない(-_-;)
と頭をこねくり回して考えていたことが、ここで生きてきているような気がします^^;
今回は、toruさん専用のMBR3D検証用オートストップ機能作成で得た知識と、LibreOffice版で考え付いた表示方法など、新しい視点と切り口(プロの方からすると大したことないんでしょうけどね^^;)で、ネックになっていた部分の解決策が見つかり、一気に前に進みました\(^o^)/
そういうわけで、SR支援用オートログの回転数無制限版については、近々Excel版とLibreOffice版を両方同時にリリース出来ることになりました\(^o^)/
また、勢いでSR倶楽部メンバー向けのover支援用オートログも2画面化出来ましたので、あとはマニュアル作成が完了次第リリースとなります。
しかし、ただ2画面化するだけ・・・というのも面白くないので・・・
簡易版のオートストップを付けることにしました。\(^o^)/
・・・というのも、複数のユーザーの方から・・・
特に先日のtoruさんのブログの記事が掲載されてから、何件かご質問、ご要望が寄せられていました。
※ルーレット兄貴の「ミ」になるオンカジDREAMER!・・・MBR3D×15カジノ最終検証~1週目結果&オートログと独自エントリーポイント [MBR3D検証プレイ](2月22日の記事)
MBR3D検証用のオートストップは、正直結構苦労しました^^;
条件付けはそれほど難しくはない・・・と思っていたのですが、いざプログラムコードにしようとすると・・・
ありゃ?
これがこーーーーなって、そんでこの変数はこのままだから・・・
これがあーーーーなったら、このフラグを出して、その時そのフラグが出ていたらこっちの処理を・・・
・・・・・・・・・
完全な文系人間のtaroからすると、途中でウッキーーーーーーーーーーーー
ただ、この苦労があったからこそ、今回のオートストップに繋がったと思います。
ちなみに、toruさんからは報酬頂いてますから(^^)
ただ働きじゃありませんよん(^^)
toruさんありがとうございますm(__)m
ただし簡易版のオートストップなので、複雑な設定は出来ません^^;
とはいえ、2種類のオートストップを実装してみました。
1つ目は 簡易オートストップ機能「オートストップモード」
2つ目は 出目指定でストップさせる「出目指定オートストップモード」
で・・・オートストップのやり方ですが・・・
最初のモード選択画面で・・・こんな画面ですね↓
画像がちっちゃいので、ボタンを拡大!
良く見ると・・・
モード選択画面の選択肢、今回のバージョンアップで変更しています(^^)
数字別間隔表を常時表示させるようにしたので、数字別間隔表へのショートカットを無くしました。
まぁこの措置は当然ですね^^;
それから、修正モードですが、オートログを作って間もない頃は、よくログミスが発生していたので付けていたのですが・・・最近はそれもないので思い切って外しました。
それに結局は数字別間隔表は修正出来ないので・・・必要ないかな・・・と^^;
そして代わりに?付けたのが、先程申し上げた「オートストップモード」と「出目指定オートストップモード」です\(^o^)/
で・・・「オートストップモード」ですが・・・
最初に書いたように簡易版オートストップなのですが・・・
クリックするとこんな画面が出ます。
ここに回転数を入力して「OK」をクリックすると、入力した回転数以上で当たると止まります。
出目指定ではなく、最初に条件を達成した出目で止まるという仕様です。
文言については・・・さも入力した回転数で止まるように思えるので、ここの文言はリリース前に変更の予定です^^;
で・・・止まる時はこんな感じです(^^)
この時は100と入力して実行したのですが・・・
「21」が113回で出たので、ここでウインドウが出てオートログ止まります。
条件が100ですので「100以上の回転数」で最初に出たのが「21」だったわけです。
ちなみに止まったら、モード選択の画面に戻ります。
皆さん、それぞれ独自の手法をお持ちだと思うのですが、大抵最初はどの出目かが規定の回転数を超えてからスタートしますよね??
taroも基本はそういう手法なので、これは必須でしょう!ということで付けましたヽ(^o^)丿
スキャルピング・ルーレットがまさにこの手法ですよね。
スキャルピング・ルーレットが分からない方はtoruさんのブログや、taroを含めたオフィシャルブロガーさんのブログから無料で請求できますので、見てみてくださいませ(^^)
次に「出目指定オートストップモード」です!
一番下のやつですね(^^)
これは出目を1つだけ指定して、その出目が設定した回転数以上で当たると止まるモードです。
モード選択でこれを選ぶと・・・
こんな感じで最初に出目を入力します。
そして、「OK」をクリックすると・・・
こんな感じで回転数を入力するウインドウが出ます。
これも入力した回転数以上の場合に止まるようになります。
で・・・回転数を入力して、「OK」をクリックすると・・・・
・
・
・
・
こんな感じで止まるわけです\(^o^)/
ここでは出目は「16」、回転数は「200」で設定しました。
ですので、「217」で止まってますよね(^^)
使い方としては・・・
まず最初に「オートストップモード」で、候補数字を選び出して・・・
次に「出目指定オートストップモード」で、その出目を追いかける・・・というのが基本でしょうか。
別に基本に囚われずに、ご自身の考えられた手法にうまく組み込めば、自動化できる部分も出来てくるのではないかと思います。
それに、今まではずーーーーーっと画面を見ていないといけなかったのが、回転数設定して止まるのを待つという楽ちんな使い方が出来るので、そこはグッドではないかと・・・自画自賛です^^;
そうそうオートストップが動いている間でも、オートログは続けてくれています(^^)
taroのオートログは「記録する」ことが基本ですので^^;
というわけで、最終調整とマニュアル作り頑張りますので、もうしばらくお待ちくださいませm(__)m
以上、今回はここまで
スキャルピング・ルーレット無料請求(taro特製特典付き!)

2016年11月7日にスキャルピング・ルーレットの配布は終了しましたm(__)m
SRAPを購入してSREA(calix)に参加はこちら!!

SREA参加募集は11月初旬に締め切られました。
taro特製SR支援用オートベットプログラム登場!

遂に悲願のオートベットプログラムが登場!!オッさん頑張った(^^;
オートログで記録をとって出目を分析、検証、オートストップでベットポイントを探してオートベットで自動コインベット!
ベット表作成も出来るぞ!!
taroの有料版オートログを持っている人は特別価格で購入可能です(≧▽≦)
↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓
既存オートログユーザー様用
申込みフォームはこちら
↑↑↑↑↑↑↑↑↑↑↑↑↑↑↑↑↑↑↑↑↑↑↑
taro特製SR支援用オートログ

taro特製SR支援用オートログ回転数無制限版です
(オートログ・・・ルーレットの出目を自動でエクセルに入力してくれるプログラムです)
「オートストップ」を搭載!あなたが考える独自手法の検証にも使えます!(2015年6月のバージョンアップでオートストップ機能を強化しました!)
さぁ!あなたも魅惑のオートログワールドへ!!
※オートログ体験版が動いている方のみへの販売です(^^)
ご購入前に体験版をお送りしますので、お試しくださいませm(__)m
※対応カジノ・動作環境についてはこちらのオートログの記事をご確認くださいm(__)m
リンク集
今のところスキャルピング・ルーレット仲間のリンク集です
SR・over・Sirius・HRP使いの皆様方、
一緒に稼ぎましょう\(^o^)/
コメント 0